Networking¶
Network related stuff.
Controller¶
Network controller.
- class oxberrypis.net.controller.Controller(context, vissync_uri, rpisync_uri, pub_uri, subscribers_expected, directory, channels_num, mapping)[source]¶
Network controller.
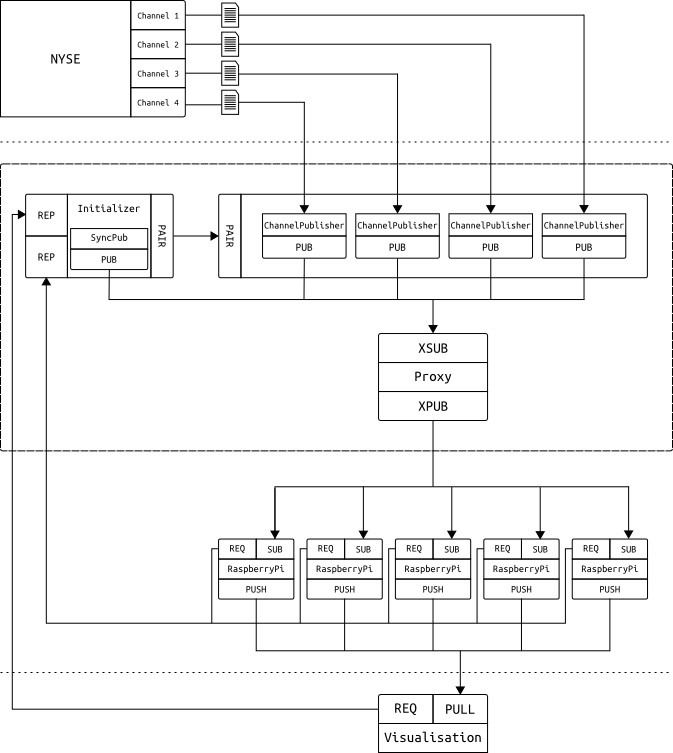
The controller starts 3 threads:
Parameters: - context – ZMQ context.
- vissync_uri – ZMQ URI for syncing with the visualisation.
- rpisync_uri – ZMQ URI for syncing with Raspberry Pis.
- pub_uri – ZMQ URI controller publishes from.
- subscribers_expected (integer) – Number of subscribers expected to connect to the controller before publishing starts.
- directory (string) – Directory for NYSE ARCA Integrated Feed channel and symbol index mapping files.
- channels_num (integer) – Number of channels to be processed.
- mapping – symbol index mapping
Init¶
Network initialization.
- class oxberrypis.net.controller.init.Initializer(context, vissync_uri, rpisync_uri, proxy_uri, to_publishers_pipe, subscribers_expected, mapping)[source]¶
Network initializer.
Initilizer works as following:
- Wait for visualisation.
- Once visualisation connects, send back ranges of symbol indexes which will be distributed over the RapsberryPis.
- Wait for given number (subscribers_expected) of Raspberry Pis.
- For every Raspberry Pi connected send back range of symbol indexes. Each range is sent to two different Raspberry Pis to allow high availability.
- Once all Raspberry Pis are connected hand over to the ChannelPublishersThread.
Parameters: - context – ZMQ context.
- vissync_uri – ZMQ URI for syncing with the visualisation.
- rpisync_uri – ZMQ URI for syncing with Raspberry Pis.
- proxy_uri – ZMQ URI for publishers proxy’s frontend.
- to_publishers_pipe – Pipe used to sync Initializer with the ChannelPublishersThread.
- subscribers_expected (integer) – Number of subscribers expected to connect to the controller before publishing starts.
- mapping – List of symbol mappings.
- class oxberrypis.net.controller.init.InitializerThread(context, vissync_uri, rpisync_uri, proxy_uri, to_publishers_pipe, subscribers_expected, mapping, name='Initializer')[source]¶
Initializer thread.
See also
For constructor parameters check Initializer.
Publisher¶
Network components responsible for publishing stock messages.
- class oxberrypis.net.controller.publisher.ChannelPublishersThread(context, init_pipe, proxy_uri, directory, channels_num, name='ChannelPublishers')[source]¶
Channel publishers thread.
Parameters: - context – ZMQ context.
- init_pipe – Pipe used to sync with the Initializer.
- proxy_uri – Destination channel publishers publish to.
- directory – Directory when channel files are found.
- channels_num – Number of channels to process. Parsing will start with channel 1.
- name – Name of the thread; useful for debugging.
- class oxberrypis.net.controller.publisher.ProxyThread(context, frontend_uri, backend_uri, name='Proxy')[source]¶
Pub-sub proxy thread.
Parameters: - context – ZMQ context.
- frontend_uri – ZMQ URI proxy listens to.
- backend_uri – ZMQ URI proxy rebpublishes to.
- name – Name of the thread; useful for debugging.
Channel¶
Network components responsible for a single channel parsing/publishing.
- class oxberrypis.net.controller.channel.ChannelPublisher(context, uri, directory, channel_id)[source]¶
Channel publisher.
Parses a single channel and publishes StockMessage messages.
Parameters: - context – ZMQ context.
- uri – ZMQ URI publisher publishes to.
- directory – Directory with NYSE Arca Integrated Feed channels files.
- channel_id (integer) – Channel ID to be parsed.
- class oxberrypis.net.controller.channel.ChannelPublisherThread(context, uri, directory, channel_id, name=None)[source]¶
Channel publisher thread.
- class oxberrypis.net.controller.channel.ChannelStockMsgsGenerator(directory, channel_id, factory=None)[source]¶
Stock messages generator from the channel.
Parameters: - directory (string) – Directory with NYSE Arca Integrated Feed channels files.
- channel_id (integer) – Channel ID to be parsed.
- factory – Factory for StockMessage objects, defaults to an instance of StockMessagesFactory.
Messages factories¶
Factories for stock messages.
These factories take messages from oxberrypis.parsing.messages and turn them into instances of proto.stock_pb2.StockMessage.
- class oxberrypis.net.controller.msgs_factories.StockMessageAddFactory[source]¶
Factory for add order stock message.
- class oxberrypis.net.controller.msgs_factories.StockMessageDeleteFactory[source]¶
Factory for delete order stock message.
- class oxberrypis.net.controller.msgs_factories.StockMessageExecutionFactory[source]¶
Factory for execution order stock message.
- class oxberrypis.net.controller.msgs_factories.StockMessageFactory[source]¶
Generic factory for stock message.
- class oxberrypis.net.controller.msgs_factories.StockMessageModifyFactory[source]¶
Factory for modify order stock message.
Raspberry Pi¶
Network communcation happening at Raspberry Pi.
Subscriber¶
Raspberry Pi stock messages subscriber/handler.
- class oxberrypis.net.rpi.subscriber.StockMessagesSubscriber(context, rpisync_uri, pub_uri, visual_uri, me_handler_cls=<class 'oxberrypis.net.rpi.handlers.UpdateMatchingEngines'>, visual_handler_cls=<class 'oxberrypis.net.rpi.handlers.ToVisualisation'>)[source]¶
Stock messages subscriber.
Parameters: - context – ZMQ context.
- rpisync_uri – ZMQ URI for syncing with the Initializer
- pub_uri – ZMQ URI for stock messages publisher.
- visual_uri – ZMQ URI visualisation binds to.
- me_handler_cls – Handler class for updating matching engines.
- visual_handler_cls – Handler class for sending stock events to visualisation.
Handlers¶
Handlers for stock data.
- class oxberrypis.net.rpi.handlers.PrintingHandler[source]¶
Simple printing handler.
Prints stock message to the console on arrival.
- class oxberrypis.net.rpi.handlers.ToVisualisation(matching_engines, context, visual_uri)[source]¶
Stock messages handler that Sends stock evnets to visualisation.
Parameters: - matching_engines (list of MatchingEngine) – Mapping stock_index -> matching_engine.
- context – ZMQ context.
- visual_uri – ZMQ URI visualisation binds to.
- class oxberrypis.net.rpi.handlers.UpdateMatchingEngines(matching_engines)[source]¶
Stock messages handler for updating matching engines.
Parameters: matching_engines (list of MatchingEngine) – Mapping stock_index -> matching_engine.
Components¶
Reusable network components.
- class oxberrypis.net.components.PubSubProxy(context, frontend_uri, backend_uri)[source]¶
Publisher-Subscriber proxy.
Based on:
- class oxberrypis.net.components.SynchronizedPublisher(context, publisher_uri, syncservice_uri, subscribers_expected=1, sync_reply=None)[source]¶
Synchronized publisher.
This publisher and SynchronizedSubscriber are generally based on http://zguide.zeromq.org/py:all#Node-Coordination. However docs notes that:
We can’t assume that the SUB connect will be finished by the time the REQ/REP dialog is complete. There are no guarantees that outbound connects will finish in any order whatsoever, if you’re using any transport except inproc. So, the example does a brute force sleep of one second between subscribing, and sending the REQ/REP synchronization.
A more robust model could be:
- Publisher opens PUB socket and starts sending “Hello” messages (not data).
- Subscribers connect SUB socket and when they receive a Hello message they tell the publisher via a REQ/REP socket pair.
- When the publisher has had all the necessary confirmations, it starts to send real data.
Therefore we implement above mentioned “more robust model”, basin on http://thisthread.blogspot.co.uk/2012/03/pub-sub-coordination-by-req-rep.html.
Parameters: - context – ZMQ context.
- publisher_uri – ZMQ URI the publisher binds to.
- syncservice_uri – ZMQ URI for publisher’s syncing service REP socket.
- subscribers_expected – Number of expected subscribers.
- sync_reply (function accepting sub_id and returning sync reply message.) – Synchronization reply function.
- handshake(sub_id)[source]¶
Perform handshake with subscriber if available.
This function checks for subscribers synchronization on the REP socket.
Parameters: sub_id – Subscriber-to-be id.
- ping()[source]¶
Broadcast a ping message.
A “ping” message is sent on the PUB socket to show the subscribers that the publisher is up and waiting for them.
Sends PING_MSG.
- publish_enveloped(key, data)[source]¶
Send enveloped data to subscribers.
Based on http://zguide.zeromq.org/py:all#Pub-Sub-Message-Envelopes
- class oxberrypis.net.components.SynchronizedSubscriber(context, publisher_uri, syncservice_uri, subscriptions, msg_handler, sync_reply_handler=None)[source]¶
Synchronized subscriber.
See also
Check SynchronizedPublisher for implementation details.
Parameters: - context – ZMQ context.
- publisher_uri – ZMQ URI of the publisher.
- syncservice_uri – ZMQ URI of the publisher’s REP socket for syncing.
- subscriptions – A list of prefixes to subscribe to.
- msg_handler – Function for handling of subscribed data.
- sync_reply_handler – Function for handling synchronization reply.
- recv()[source]¶
Receive messages and proccess them using msg_handler in a loop.
Stops when SynchronizedPublisher.END_MSG is received.
- recv_multipart()[source]¶
Receive mulitpart messages and process them using msg_handler in a loop.
Stops when SynchronizedPublisher.END_MSG is received.
To be used with pub-sub message envelopes; based on http://zguide.zeromq.org/py:all#Pub-Sub-Message-Envelopes